All paradigms are done using a Shuttlebox
Med Associates, Inc.
Avoidance
Active Avoidance
Active avoidance is what is typically thought of as avoidance learning. Due to the different associations that can be formed by the mouse during avoidance learning, it has been thought to involve both classical and operant conditioning processes (most famously characterized by Hobart Mowrer's Two-Factor Learning Theory).
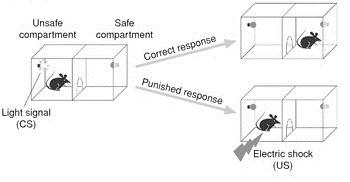
Branchi & Ricceri (2013)
Active avoidance paradigms require the mouse to learn to avoid an aversive stimulus (a shock) by initiating a behavior (locomotion). The mouse is placed in one of the two shuttlebox compartments. They are exposed to a conditioned stimulus (light, tone, etc.) followed by the delivery of a footshock (unconditioned stimulus). Two types of responding can emerge directly after this exposure phase: a conditioned response (avoidance learning) and an unconditioned response (escape learning)--often times,escape responses precede the emergence of avoidance responses. Avoidance is characterized by responding where a mouse actively avoids the oncoming shock by moving to the opposite compartment after the CS is presented. Escape is characterized by responding where a mouse does not respond to the CS, but responds to the US by escaping to the opposite compartment.
Passive Avoidance
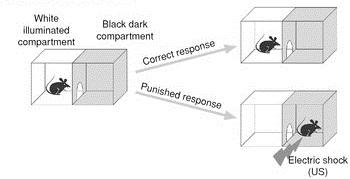
Branchi & Ricceri (2013)
Passive avoidance paradigms require the mouse to suppress a (innate) behavior to avoid an aversive stimulus (a shock). A shuttlebox is arranged so that one compartment is "dark" (through the use of opaque walls or an external cover) and one is "light." Mice have an innate tendency to prefer dark areas over light ones, so their natural instinct will be to move, through a connecting door, from the light compartment they are placed in to the dark compartment. During acquisition, this innate behavior results in the connecting door shutting and an aversive shock being delivered to the mouse in the dark compartment. The mouse should, therefore, learn that moving to the dark compartment has negative consequences. During the test phase, the mouse is again placed in the light compartment and monitored. Passive avoidance is evaluated as the suppression of the (innate) behavior of moving into the dark compartment. As such, the latency to enter the dark compartment (if the mouse does at all) is measured. This measure is correlated with memory.
Escape
Escape conditioning occurs when an animal learns to perform an operant behavior to terminate an aversive event or stimulus. In a shuttlebox, this occurs when a mouse learns to escape (i.e. move to) the opposite compartment after receiving a footshock in their current compartment. It is a classic example of negative reinforcement.
Learned Helplessness
Learned helplessness occurs when a mouse has been exposed to an inescapable aversive event or stimulus. Using a shuttlebox, a mouse is placed in one compartment with the door to the opposite compartment closed. The mouse then receives a footshock and cannot escape it. After several presentations under these circumstances, a mouse has difficulty learning to avoid or escape the footshock even when able to do so. After the unavoidable presentation of aversive stimuli (footshocks), a mouse learns that it has no control over these presentations (or its environment). This leads to generalized helpless behavior (learned helplessness) that persists even when the environment/contingencies change so that the aversive stimuli are no longer unavoidable. Learned helplessness is a behavior associated with and influenced by depression in humans.